
Internal Structure of Mortar Headd
Power Cylinders
In any case, pretty much everything in a MH is dependent upon "reactive gearing driven by ezlaser energy pressure." While the joints like the elbow and knee are rotational links, these are not moved by anything like a spinning motor. A motor drive would be unable to produce instantaneous movement; the gearing and cams would be much too complex to suddenly pull a hand back, or rapidly dash into a jump. The whir and rumble of a motor driving cams in a joint’s axis can reproduce only abnormally slow motions. The cams and gears needed to produce the appropriate torque for a joint would make the joint itself unreasonably large, and such a complex joint would no doubt be unable to support its own weight.
While I apologize for going off track with an example, the robot dog that was popular a while back moved using this kind of shafted joint. As a toy, I think it was quite innovative, but this is just an example of the kind of movement you get from a motorized joint. Sorry.
Right, then. MH movements are born from pistons called "power cylinders" which can expand and contract with instantaneous speed. If you’d like, you can think of the variously-shaped cylinders set in a MH as being like a car engine’s pistons, moving in and out by combustion. The movement of these pistons can be freely controlled from dreadfully slow to near-lightspeed. The cylinders are driven with the power produced by pushing ezlaser energy into the piston cylinders.
To instantly bend the arm, ezlaser energy is explosively fed to the outside pistons on the upper and lower arms, reproducing the motion of suddenly pulling back the hand. Essentially, this is the same way human muscles move. Obviously, the MH joints and connected cylinders are much more complicated than a human’s, but the theory is the same as for these simpler connections.
Conversely, to bend the arm slowly, ezlaser energy would be fed to the same cylinders at a very slow rate, resulting in the cylinders expanding slowly. To reverse this process and compress these cylinders (therefore extending the arm), we’d use the opposite side of the arm in the same way that muscles work, simply expanding the inside pistons to compress the outside ones.
Power cylinders are divided into multiple types by purpose:
- Converting pressure in one direction only, "Single Phase Cylinder"
- Damper-style with the center of the cylinder reacting to pressure from both ends, "Counter-reactive Cylinder"
- Converting pressure from the center in both directions, "Bidirectional Cylinder"
- Splitting partway, can adjust pressure in all directions, "Y-shaped (or V-shaped) Cylinder"
- Further adjusting pressure in four directions, "X-shaped Cylinder"
These cylinders, absorbing ezlaser power, are essential to driving a MH. The cylinder includes only the pressure-converting piston part and the ezlaser energy explosive pressure chamber. As the cylinder is sufficient for movement by itself, there is no need for any further pumps or compressors for hydraulic dampers, or support motors and gearing. Since power cylinders are the primary driving force, motors and dampers are only used as backups.
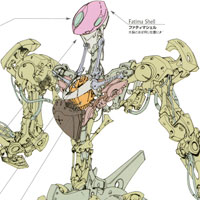
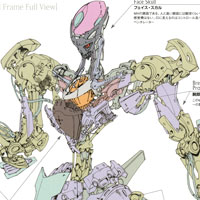
The whooshing sound MH are always producing is the sound of energy being fed to these power cylinders, and are the sound of an active MH. The complex linkages of the power cylinders can reproduce the standard movements of bending, stretching, pulling, pushing, twisting, and turning at any speed. See the illustrations for further details. Further, joints including the neck, base of the shoulder blade, base of the heel, elbow, and secondary joints like the wrist have cams and gearing for motors built-in. In the event that cylinders at drive joints are destroyed, the attached motors can provide backup power and maintain clearance for the armor plating.